

EtherCAT MainDevice Development
Develop custom high-performance EtherCAT MainDevice applications with EC-Master at the core, supported by a full suite of configuration, simulation, monitoring, and diagnostics tools.
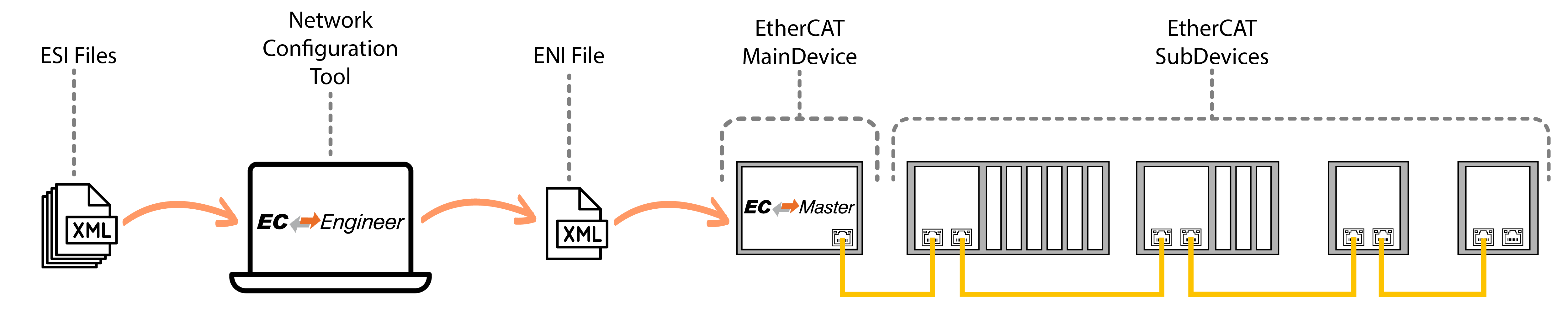
The MainDevice development workflow
-
1Configure the EtherCAT networkImport SubDevice ESI files, define topology and process data, and generate the ENI file describing the network.
-
2Develop your custom applicationIntegrate the EC-Master stack into your C, C++, Python, or Rust application.
-
3Run deterministic EtherCAT communicationInitialize SubDevices, manage state transitions, and exchange cyclic process data in real time.
A streamlined workflow designed for real-time performance and long-term maintainability.
MainDevice Implementation Guide Videos
Practical walkthroughs covering initial setup, application development, process data access, diagnostics, and more.

MainDevice Implementation Guide Playlist
Step-by-step videos for first-time evaluators.
View playlist on YouTube →
Validate earlier with EC-Simulator
Develop and test EtherCAT MainDevice applications against simulated or mixed real-and-virtual networks using Software-in-the-Loop and Hardware-in-the-Loop setups.
